Temporizador estándar con un 555

Este circuito es un temporizador estándar, programable de 1segundo hasta horas, dependiendo de los valores del condensador C1 y de la resistencia Ra.
El montaje es muy sencillo, únicamente hay que montar el circuito siguiendo el esquema. La salida es un sólo pulso de duración específica, dependiendo de Ra y C1, cada vez que se envía un pulso de disparo al terminal 2. Este disparo debe ser de +5V a cero y otra vez a +5V. El tiempo de duración es 1,1RaC1. El terminal 4 se utiliza para parar el pulso una vez comenzado el ciclo, conectándolo a masa y desconectándolo de Vcc.
Alimentación:
- V max: simple 12 V DC
- I max: 0.1A
uso doméstico
Un temporizador puede ser un utensilio de cocina que permite controlar los tiempos de cocción. A menudo se integran en los hornosconvencionales u hornos microondas. También aparatos como la lavadora o la secadora están equipados con temporizadores.
En la actualidad la mayor parte de los aparatos electrónicos, tales como los teléfonos móviles o los ordenadores personales, cuentan con una función de temporizador.

Un temporizador puede utilizarse también como un simulador de presencia, permitiendo que un aparato electrónico (cómo una radio o una luz) permanezca encendido durante un tiempo predeterminado, con el fin de prevenir robos. Igualmente puede utilizarse para que un dispositivo conectado a la corriente eléctrica se conecte o desconecte en un momento dado (relativo, ej. al de una hora o absoluto, ej. a las 13 horas). Esto es especialmente útil para aquellos aparatos que no cuentan con un temporizador propio o que no pueden programarse
Temporizador programable de 1 a 99 segundos

El montaje no es complicado si seguimos el esquema teórico para su realización. Es muy importante respetar el patillaje en los circuitos integrados y también es importante la colocación de un disipador en el triac para cargas superiores a 200 W. Una vez montado y revisado procederemos a la comprobación ajustando un tiempo determinado en X1 y X10. Luego pondremos en marcha el temporizador junto con un cronómetro. Si los tiempos no coinciden, revisar el valor de las resistencias
Alimentación:
- V max: simple 12 V DC
- I max: 0.3A
Temporizador luces escalera

El circuito es bien simple y consta de solo dos elementos activos. El primero un temporizador 555, el cual esta configurado en nuestro caso como monoestable. Luego éste gobierna un triac, que hace las veces de conmutador de potencia.
Si se superan los 500W de consumo se debe colocar disipador térmico al triac
Alimentación:
- V max: red electrica
- I max:
Temporizador luces escalera
El circuito es bien simple y consta de solo dos elementos activos. El primero un temporizador 555, el cual esta configurado en nuestro caso como monoestable. Luego éste gobierna un triac, que hace las veces de conmutador de potencia.
Si se superan los 500W de consumo se debe colocar disipador térmico al triac
Alimentación:
- V max: red electrica
- I max:
Temporizador de 5 a 30 minutos

Sencillo temporizador basado en un LM7555
El tiempo viene dado por la siguiente formula:
T = 1.1 C1 x R1
Alimentación:
- V max: simple 12V DC
- I max: 0.1A (sin carga)
EL CIRCUITO TEMPORIZADOR |
El circuito electrónico que más se utiliza tanto en la industria como en circuitería comercial, es el circuito temporizador o de retardo, dentro de la categoría de temporizadores, cabe destacar el más económico y también menos preciso consistente en una resistencia y un condensador, a partir de aquí se puede contar con un sinfín de opciones y posibilidades. En este tutorial se tratarán unos tipos sencillos para adquirir conocimiento de cómo conseguir un retardo en un sistema que no requiera gran precisión y terminaremos por analizar un temporizador de mayores prestaciones y precisión.
Cuando necesitamos un temporizador, lo primero que debemos considerar es la necesidad de precisión en el tiempo, base muy importante para determinar los elementos que vamos a utilizar en su concepción y diseño.
Como se ha mencionado anteriormente un temporizador básicamente consiste en un elemento que se activa o desactiva después de un tiempo más o menos preestablecido. De esta manera podemos determinar el parámetro relacionado con el tiempo que ha de transcurrir para que el circuito susceptible de temporizarse, se detenga o empiece a funcionar o simplemente cierre un contacto o lo abra.
EL MÁS SENCILLO.
El más simple de los retardos, requiere de una resistencia de cierto valor y un condensador de considerable capacidad.
Veamos, se necesita un retardo en una máquina cizalla de corte, la cual conlleva cierto riesgo de accidentar al operario que la maneja.
- Necesitamos un sistema de seguridad para que sólo cuando el operario esté fuera de peligro, la cuchilla pueda bajar.
- Otro sistema de seguridad, consiste en producir un retardo y al mismo tiempo un sonido o luz intermitente de aviso.
El primer caso, se puede lograr con la combinación de unos fines de carrera y un par de pulsadores, localizados fuera del recorrido de la cuchilla y sus alrededores.
Para el segundo punto, podemos optar por un diodo rectificador D1, una resistencia R1 y un condensador C1. El montaje sumamente sencillo se muestra en la figura 1.

Fig. 1
El diodo D1 se encarga de rectificar la corriente proporcionada por un secundario de un transformador o simplemente de la red a la que se conectará el equipo al que se ha de controlar, para lo cual deberá observarse las precauciones básicas y elementales a la hora de seleccionar los diferentes elementos mencionados, respetando un margen de seguridad en la tensión a la que se someterán en el montaje.
A continuación se intercala la resistencia R1 que será la responsable directa del tiempo de carga del condensador, es decir, a mayor valor ohmico le corresponde un mayor tiempo de carga del condensador.
El siguiente elemento, el condensador, debe escogerse de una considerable capacidad cosa muy determinante, pero sin perder de vista la tensión a la que se verá sometido, para evitar que se perfore y quede definitivamente inservible. A la hora de elegir el condensador, es conveniente considerar su tamaño y siempre que sea posible debería optarse por un modelo electrolítico (de ahí el uso del diodo), como digo electrolítico debido esencialmente a la mayor capacidad y menor tamaño, cosa que en algunos casos no es posible, utilizando en tal caso uno de los no polarizados industriales de unos 8 a 12 µf y por seguridad 400V, los que suelen utilizar en los motores de las lavadoras o frigoríficos.
Bien, veamos que ocurre cuando se aplica una tensión a la figura 1 a, la corriente al atravesar el diodo D1, se rectifica a media onda, esto la reduce aproximadamente a la mitad, esta tensión se enfrenta al paso de la resistencia R1, que le restringe su paso a un valor previsto por el diseñador.
A la salida de R1, la tensión se precipita para cargar el condensador C1, que es el camino que menor resistencia le ofrece y, ese tiempo de carga, justamente es el tiempo que se pretende controlar, ya que durante ese tiempo de carga, la corriente no fluirá más allá del condensador. Hay que tener en cuenta que el tiempo de carga, no representa más que dos tercios (2/3) de la capacidad total de C, rebasada la cual, la corriente empezará a fluir hacia el siguiente elemento conductor que encuentre, terminando así el retardo.
De lo expuesto, se puede asegurar que la corriente que atraviesa el circuito, recorre dos caminos; uno el representado por la línea de trazos (Ic) durante los primeros 2/3 de carga, y otro, el de la salida (Id). La salida puede conectarse a un relé que se encargará de producir el efecto deseado conectar/desconectar, según lo previsto. Este sistema se estuvo utilizando hasta los años 70 en cierto control de los ferrocarriles de España, en el sistema de seguridad llamado 'hombre muerto'
Este caso digamos que es el directo, también se puede utilizar una forma más, digamos sofisticada, a esta se conecta el relé RL, en serie con la resistencia R1, a la cual se le calculará su valor, de manera que la corriente que la atraviese, active el relé sólo cuando el condensador C, se haya cargado. la tensión de trabajo del relé deberá ser la que corresponda a la tensión nominal de alimentación del circuito, para evitar que se queme cuando se active mediante la corriente de paso en carga.
En ambos circuitos, se percibe que el control no es tal, ya que la carga del condensador se ve influenciada por muchos imponderables, además de poco fiable. Se necesita un mayor control y rango de tiempos.
La solución puede estar en los transistores que permiten un mayor control de los diferentes parámetros. Debido al control de ganancia y paso de corriente que nos permite el transistor y mediante un montaje adecuado, podemos lograr una mejora en los tiempos y por lo tanto más fiabilidad, al utilizar condensadores más pequeños. Véase en la figura 2, la báscula formada por T1 y T2 a los que se ha añadido un tercer transistor para mejorar la carga del relé a su salida. El funcionamiento de la báscula determina mediante el ajuste de los potenciómetros P1 y P2 los tiempos de basculamiento obteniendo un mejor control de amplitud del tiempo de retardo.
No obstante y a pesar de lograr una considerable reducción en la capacidad de los condensadores, lo que conlleva una mayor seguridad y control, no es bastante fiable en algunos casos y la industria necesitaba algo más compacto que le dotara de tiempos mas largos y fiables. Esto se lograría mediante el circuito integrado temporizador µA555.

Fig. 2
EL TEMPORIZADOR µA 555


Creo que es hora de que utilicemos un circuito integrado, en la industria se viene utilizando desde los años 70, uno muy popular que además de sencillo es muy eficaz y versátil a la hora de producir temporizaciones, estoy hablando del socorrido µA555PC, que nos permite construir un temporizador mediante unos pocos componentes de bajo coste. Su estabilidad con la temperatura es de 0'005 % por grado centígrado. Aquí, se describen de forma simple algunos aspectos de este CI. En otro manual, se entrará con mayor detalle.
Veamos el esquema teórico en la figura 3 en la versión como monoestable y en la figura 4, con el modo astable .
|


Aplicando una señal de disparo, el ciclo de temporización se inicia y una báscula interna le inmuniza frente a futuras señales de disparo. Al aplicar una señal de reposición (rest), el ciclo de retardo se interrumpe dándose por finalizada la temporización. Entre sus características más importantes, hay que destacar el amplio margen de control de tiempo desde microsegundos a horas.
Funcionando como astable o monoestable, el ciclo de trabajo es capaz de proporcionar 200 mA de corriente en su salida.
Funcionamiento monoestable
En el apartado anterior vimos cómo producir un retardo o temporización, la referida figura 3 esta aquí, el esquema que se presenta es bastante sencillo y corresponde a un montaje monoestable, el cual se caracteriza por el modo de conexión de la patilla 2, Disparo, la cual debe permanecer en nivel alto, hasta el momento de empezar la temporización, hemos de hacer notar que esta patilla, debe ser repuesta a su nivel alto, antes de terminar la temporización, si se quiere ampliar el retardo, para evitar disparos fortuitos que variarían el tiempo previsto.
La salida es capaz de entregar una corriente de 200 mA máximo, en caso de necesitar mas corriente, utilizar un relé con contactos que soporten una mayor corriente. Mientras la patilla de disparo esté a nivel alto, la salida patilla 3, permanecerá a nivel bajo, esto debe tenerse en cuenta, para un mejor aprovechamiento del dispositivo.
Mediante este principio de esquema, podemos trazar un temporizador que encienda o apague una luz con un retraso de tiempo que vendrá calculado mediante la siguiente formula:
T = 1.1*Ra*C

Fig. 5
En la figura 5, se presenta el esquema que cumple con las exigencias descritas, con un retraso en el enciendo o apagado, de un diodo led. El circuito como se menciona, puede utilizarse tanto para el encendido como para el apagado de un diodo led o una lámpara, así mismo mediante un relé, se puede poner en marcha o parar un motor. En las figuras, se pueden cambiar el diodo led, por un relé para dotar si es necesaria de mayor potencia a la salida.
En el caso de necesitar encender el led durante un tiempo previsto, dicho led se conectará entre la salida, patilla 3 y la masa o negativo, permaneciendo encendido hasta transcurrido el tiempo establecido desde el impulso de disparo, figura 6, un pulso de puesta a cero (PAC) en el reset reiniciará el retardo. Una posible aplicación de seguridad, emitir una señal de alarma durante un período de tiempo desde que se da la señal corte, hasta que baja la cuchilla de la cizalla, evitando así accidentes laborales.

Fig. 6
En el segundo caso, o sea, necesitamos que el led, permanezca apagado durante un tiempo desde que se aprieta un pulsador y permanezca apagado hasta que vuelva a pulsarse. En este caso se conectará el led entre el Vcc de la alimentación y la patilla 3 de salida, ver figura 7. Una aplicación sería que no se abra la puerta del garaje hasta que se le de la señal y pasado ese tiempo se cierre de nuevo hasta la siguiente señal de apertura.

Fig. 7
Estos son dos ejemplos bastante corrientes y que pueden ponerse en práctica en cualquier momento por parte del alumno o del profesional en las labores habituales con total seguridad. Como se verá, la resistencia Ra, es conveniente ponerla del tipo ajustable para que sea más práctico el montaje. En la figura 8, se muestran las señales de disparo flanco de subida, t el tiempo de retardo y de salida del esquema monoestable.

Fig. 8
Funcionamiento astable.
En este caso es la figura 9, la que nos presenta el esquema básico de este modo de funcionamiento. Puede ser interesante conocer su funcionamiento como astable (también llamado redisparable ya que eso es lo que hace, produciendo así cierta frecuencia), ya que uniendo sus terminales 2 y 6, el circuito se auto dispara y trabaja como multivibrador.
Es de destacar que, el comportamiento de este esquema, a grandes rasgos, genera una señal cuadrada en el tiempo, es decir, en la salida, el usuario dispone de una señal cuadrada con un ciclo de completo que viene determinado por la formula:

Fig. 9
El condensador C1 se carga a través de Ra+Rb y se descarga a través de Rb. De esta forma, dimensionando adecuadamente los valores de Ra y Rb, se pueden modificar a voluntad el ciclo de trabajo (duración estado alto - duración estado bajo), ver figura 9.
La señal cuadrada tendrá como valor alto = Vcc y como valor bajo = 0V (aproximadamente). Si se desea ajustar el tiempo que está a nivel alto y bajo al 50%, se deben aplicar las fórmulas:
Salida a nivel alto: T1 = 0.693*(Ra+Rb)*C
Salida a nivel bajo: T2 = 0.693*Rb*C
Salida a nivel bajo: T2 = 0.693*Rb*C
En la figura 10, se presenta las señales del circuito astable con un ciclo del 50%. La duración del estado alto depende de Ra y Rb, mientras que la duración del estado bajo, depende de Rb.

Fig. 10
En alguna aplicación muy concreta, puede aprovecharse esta particularidad que ofrece el montaje astable, al producir un ciclo alto-bajo del 50%, lo que nos permitirá (dimensionando adecuadamente los valores de las resistencias y el condensador), disponer de un período activo seguido de otro período inactivo, ambos lo suficientemente largos según nuestras necesidades.
Este último circuito integrado, con sus posibilidades, nos puede servir en muchos casos, pero ya que somos perseverantes y son muchos los caso en los que los tiempos a controlar deben ajustarse al tiempo real, debemos pensar en un circuito con mayores garantías de lo que hemos visto hasta ahora.
Puede encontrar más información sobre el circuito 555 en el tutorial descrito en este enlace.
Hasta aquí, hemos tratado de alguna forma los principios de los temporizadores, desde lo más rutinario, que normalmente no utilizaremos, por lo obvio que resulta su falta de seguridad, hasta el más popular de los circuitos integrados, como el µA555, con sus dos vertientes de monoestable, en el caso de necesitar disparar el retardo por cualquier medio y astable, en el caso de necesitar un multivibrador o generador de frecuencias.
En esta parte, vamos a dar un paso más en la maraña de posibilidades que se nos pueden presentar para trazar un temporizador o disparador con una señal, retardo de tiempo programado.
En un principio, nos proveeremos de un circuito integrado de la familia CMOS, utilizaremos éste, porque el margen de tensión para su alimentación y bajo consumo, es bastante ancho con respecto al de otras familias. El circuito integrado en cuestión el CD4093, se trata de 4 puertas NAND (NO-Y) de 2 entradas, que es muy popular y económico, cuyas patillas y tabla de la verdad, se pueden ver en la figura 11, obsérvese la particularidad de las puertas NAND, siempre que una entrada se encuentre a nivel 0, la salida se encontrará a nivel 1.
| |||||||||||||||||||

Fig. 11
Bien, otra particularidad no muy conocida de las puestas lógicas es, su capacidad de amplificación, que si bien es de baja ganancia y corriente de salida, no impide que la podamos utilizar en modo amplificador analógico, como vamos a hacer en este ejemplo, aunque como siempre sin entrar en pormenores y formulas para un estudio exhaustivo ya que, no es el caso.
Función Monoestable
Pongámonos en marcha, tomemos una de las 4 puertas disponibles en el 4011B y conectaremos la patilla 1 entrada a la patilla 14 que, es el positivo de alimentación, la otra entrada patilla 2, por un lado la conectaremos a la unión de una resistencia R1 y el terminal positivo de un condensador electrolítico C1, el polo negativo del mismo a masa o negativo de la alimentación, el otro extremos de la R1 lo conectamos al positivo de alimentación, como se aprecia en la figura 12.
Cuando a la entrada E, le aplicamos un impulso, en la salida, patilla 3, podemos comprobar que tenemos un pulso de cierta duración, que viene determinado por R1 (50k<R1<1M) y el condensador C1 (100pf<C1<1µf), véase la figura 12.

Fig. 12
Se debe amplificar esta señal mediante un transistor, con una resistencia de R2=10k en la base y otra en el emisor de 1k, donde se obtendrá la salida no invertida. El motivo por el cual se debe utilizar este transistor separador, es precisamente para evitar cargar en exceso la salida de la puerta provocando un desequilibrio en su normal funcionamiento y sobre todo por que la corriente de salida de estas puertas es muy baja.

Fig. 13
En cuanto a la patilla 1 de la puerta que, ahora tenemos conectada al positivo de alimentación, si la desconectamos y la tiramos a masa temporalmente, mediante una resistencia R3 (10k), nos sirve como control de inicio de la temporización, véase la figura 13.
Función astable
Ahora, vamos a proceder con el conexionado de la puerta como funcionamiento multivibrador o astable, el cual producirá una frecuencia dentro de los márgenes de la familia CMOS, entre los 0'1 Hz. y los 20MHz. En este caso, la disposición de la patilla 1, nos servirá como bloqueador de la oscilación, cuando la dejemos puesta a masa por medio de R3. Cuando la queramos habilitar, la pondremos a nivel 1 conectándola al +Vcc, lo que hará que entre en oscilación.
Si la habilitación y deshabilitación la producimos de forma controlada con una frecuencia baja, se comportará como una portadora, produciendo lo que llamamos trenes de impulsos. Véase la figura 14.


Fig. 14a y 14b
Esta forma de conseguir realizar un temporizador o un oscilador controlados, puede servirnos en multitud de casos, pero sigue siendo muy ineficiente, me explico, no tenemos un control del tiempo real transcurrido, es muy poco fiable, no se puede decir que sea exacto. Para lograr controlar los tiempos de retardo con una precisión de centésimas de segundo o mejor, tenemos que servirnos de la tecnología digital en su forma más natural, es decir mediante una señal de reloj.
Llegados hasta aquí, debo recomendar la lectura del tutorial 'base de tiempos', que se encuentra en el apartado de glosarios, del mismo autor.
En dicho tutorial o manual, se trata de forma simple cómo generar una señal de reloj con alta precisión, realizada mediante un cristal de cuarzo de uso cotidiano, así obtendrá una serie de señales patrón, de forma económica tanto para el profesional como para el estudiante.
Siguiendo dicho estudio, podemos construir un contador, como el descrito en la lección 6, donde se aborda la construcción de un contador con preselección, lo que nos permite fijar una cuenta máxima con dicho preselector, pasada la cual, el contador se pone a cero de forma automática, dando una señal de salida y vuelve a iniciar la cuenta, si así se desea. O por el contrario, habilitando la patilla adecuada del contador, puede contar a la baja o descontar desde una cuenta preseleccionada, pero eso se describe como se ha dicho en la lección 6.
El circuito temporizador digital tiene que cubrir las mismas prestaciones que los analógicos y además obtener la máxima exactitud posible, lo que le confiere unas posibilidades adecuadas para la mayoría de los casos.
Algo más arriba, hemos tratado la forma de realizar un temporizador o un oscilador controlados, que puede servirnos en multitud de casos, también vimos que no es muy eficiente, por falta de un control del tiempo real transcurrido, es por esto muy poco fiable. Vamos a utilizar la tecnología digital para conseguir una señal de reloj, es decir, una señal de 1herzio/segundo, para a partir de ella lograr una temporización con la mayor fiabilidad posible.
Si ha leído el tutorial 'base de tiempos', que se encuentra en el apartado de glosarios, puede seguir con mas facilidad lo que sigue, ya que apoyándose en una señal de reloj, podemos construir un contador, como se describe en la lección 6, donde se aborda la construcción de un contador con preselección, lo que nos permite fijar una cuenta máxima con dicho preselector, pasada la cual, el contador se pone a cero de forma automática, dando una señal de salida y vuelve a iniciar la cuenta, si así se desea. O por el contrario, habilitando la patilla adecuada del contador, puede contar a la baja o sea descontar desde una cuenta preseleccionada.
Veamos como conseguir lo propuesto en el apartado anterior. En principio, tomaremos la base del contador descrito como hemos dicho, en la lección 6 (en el esquema de la figura 8), vemos la forma de conexión del circuito integrado 74HCTLS192 junto a tres puertas NAND de dos entradas, mediante las cuales conseguiremos que el contador así dispuesto, avance o retroceda en su cuenta dependiendo de la posición del conmutador C up/dw, dispuesto a tal efecto.
Dos de las tres puertas NAND, se utilizan para direccionar el modo de cuenta arriba (avanzando) o abajo (retrocediendo), el efecto se logra con la tercera puerta conectada como inversor, al unir sus dos entradas al contacto común del conmutador de cuenta C up y al mismo tiempo a las entradas libres de estas dos puertas. La salida de cada puerta NAND se conecta una a Eu y la otra a Ed del 74HCTLS192, observar que ambas son complementarias entre si, ya que es condición necesaria.
La cuenta puede iniciarse en cualquier punto, incluso diferente de 0(cero), es decir, podemos preestablecer el punto de conteo y la dirección de la cuenta según nos convenga en cada caso, mediante los mini-dips de preselección MD.
Bien, ahora fijémonos en las dos salidas del 74LS192, me refiero a las Sc (salida de acarreo) y Sb (salida de borrado), aquí en estas dos patillas, esta la clave del temporizador. Veamos.
Estando en la función de conteo hacia arriba, cuando la cuanta llega a 9, la salida Sc, se pone en nivel H (alto) y permanece así hasta que el contador pasa a 0 (cero), lo que sirve para pasar una unidad de cuenta al posible contador siguiente de las decenas. En cambio en la función de regresión o conteo hacia a 0, la salida Sb, no se activa hasta que dicha cuenta no pasa por 0, descontando una unidad en el contador de la anterior década si es que existe.
Para comprender mejor lo expuesto en el párrafo anterior, vamos a considerar que tenemos un contador como el descrito con dos dígitos, lo que supone poder contar 100 unidades, desde 00 hasta 99, además, el contador lo hemos preseleccionado de manera que cuente desde 00 hasta 99.
Cada vez que le llega un impulso de conteo a la patilla de entrada Eu, el display nos muestra en el primer dígito que cambia de 0 a 1 en el primer paso, de 1 a 2 en el segundo y así sucesivamente, pero qué ocurre cuando llega a 9. Que cuando rebasa dicha cuenta por llegar un nuevo impulso, el contador pasa de nuevo a 0, lo que hace que la patilla de salida Sc, envíe a su vez un impulso de la misma duración que el de entrada hacia el siguiente contador, propagando de esta forma la cuenta más allá de 9, reflejándose en el segundo dígito que hasta ahora marcaba 0 y pasa a su vez a marcar 1 (una decena).
El conjunto de los dos dígitos del display muestran sucesivamente 00, 01, 02, 03, 04, 05, 06, 07, 08, 09, 10 y así continúa mientras le lleguen impulsos de conteo a la puerta de entrada. Qué ocurre cuando la cuenta llegue a 99, sencillamente la salida Sc del segundo contador nos dará un nivel alto durante el paso del impulso de 99 a 00 que es el siguiente número a mostrar, reiniciándose la cuenta.
Bien, llegados a este punto, aprovecharemos este impulso de la salida Sc del segundo contador, para mediante una resistencia, conectada a la base de un transistor activar la carga que deseemos aplicar a su salida. Dado que el primer dígito del contador también dispone de una salida Sb, esta se aplicará a través de la resistencia adecuada a la base del transistor que activará la carga puesta en su colector al pasar el contador de 99 a 00.
Se deduce que la carga del transistor dispuesto se activará cada 100 impulsos de reloj o lo que es lo mismo 100 segundos, ahora bien, si queremos que las cuentas nos salgan redondas y ya que hablamos de tiempo, sería interesante que los pulsos a contar se consideren minutos, es necesario poner el segundo contador en 6 mediante los preselectores y de esta forma, contará 60 segundos cada vez que pase por 00, tanto si cuenta como si descuenta. Se dispone de un pulsador Clear, para reponer la cuenta y digo reponer debido a que la cuenta como se indica puede empezar desde el punto que se desee.
Es conveniente ver la siguiente figura, para aclarar las dudas.

Fig. 15
Este modo de aplicación de un contador digital para producir un temporizador, sin duda es más complejo que cualquiera de los descritos anteriormente, no obstante hemos de convenir en que, a la hora de utilizarlo resultará más flexible, más fiable y exacto que cualquiera de aquellos. Esta forma, nos permite preestablecer con total precisión, los tiempos de retardo necesarios para cada necesidad, además de permitirnos una visión directa, mediante la presentación gráfica con unos dígitos dispuestos a tal efecto, lo que podemos apreciar en la siguiente figura 16, en la que se puede apreciar el transistor Tr de salida con el relé Rc de carga y su diodo D1de seguridad, para evitar la destrucción del transistor.

Fig. 16
Espero que haya quedado claro el tema, no obstante si el lector no entiende o le necesita aclarar algún punto, puede ponerse en contacto con nosotros y le atenderemos de forma personalizada. Por cierto, el relé que activará el transistor, tan sólo se activa por un instante, es decir, durante el ancho del impulso de conteo, esto se soluciona añadiendo un pequeño circuito (como los descritos en anteriores lecciones), que mantenga dicho estado de activación durante un período conveniente, según la necesidad que tengamos.
Se denomina temporizador al dispositivo mediante el cual podemos regular la conexión o desconexión de un circuito eléctrico durante un tiempo determinado.
El temporizador es un tipo de relé auxiliar, pero se diferencia en que sus contactos no cambian de posición instantáneamente.
Contenido [ocultar] |
Tipos de Temporizador
Temporizador a la Conexión
Cuando el temporizador recibe tensión y pasa un tiempo hasta que conmuta los contactos, se denomina Temporizador a la Conexión.
Es un relé cuyo contacto de salida conecta después de un cierto retardo a partir del instante de conexión de los bornes de su bobina a la red. El tiempo de retardo es ajustable mediante un potenciómetro o regulador frontal del aparato si es electrónico. También se le puede regular mediante un potenciómetro remoto que permita el mando a distancia ; este potenciómetro se conecta a los bornes y no puede aplicarse a los relés de los contactos.
Temporizador a la Desconexión
Cuando el temporizador deja de recibir tensión y al cabo de un tiempo conmuta los contactos, se denomina Temporizador a la Desconexión.
Es un relé cuyo contacto de salida conecta instantáneamente al aplicar la tensión de alimentación en los bornes de la bobina. Al quedar sin alimentación, el relé permanece conectado durante el tiempo ajustado por el potenciómetro frontal o remoto, desconectándose al final de dicho lapso.
Temporizador Térmico
Actúa por calentamiento de una lámina bimetálica. El tiempo viene determinado por el curvado de la lámina.
Consta de un transformador cuyo primario se conecta a la red, pero el secundario, que tiene pocas espiras y esta conectado en serie con la lámina bimetálica, siempre tiene que estar en cortocircuito para producir el calentamiento de dicha lámina, por lo que cuando realiza la temporización se tiene que desconectar el primario.
Los relés térmicos o dispositivos que utilizan procedimientos térmicos para la temporización, pueden incluirse en los siguientes grupos :
- Relés de Biláminas
Una bilámina está constituida por dos láminas metálicas, acopladas en paralelo y atravesadas por la corriente eléctrica, que las calienta por el efecto Joule.
Como los coeficientes de dilatación de las dos láminas son diferentes cuando se calienta una, atrae a la otra y cuando se enfrían, vuelve a la posición inicial.
- Relés de Barras Dilatables
Los contactos se mueven cuando la diferencia de temperatura entre dos barras dilatables idénticas alcanza el valor deseado, estando una de las barras calentada eléctricamente por la corriente de mando.
De esta forma las variaciones de temperatura ambiente actúan de la misma manera sobre la posición de las dos barras dilatables, sin tener efecto alguno sobre la posición de los contactos. Por consiguiente, solo la barra calentada eléctricamente manda los contactos. De esta forma, se obtienen temporizaciones comprendidas entre 2 segundos y 4 minutos, con una precisión de un 10 %.
Temporizador Neumático
El funcionamiento del temporizador neumático esta basado en la acción de un fuelle que se comprime al ser accionado por el electroimán del relé.
Al tender el fuelle a ocupar su posición de reposo la hace lentamente, ya que el aire ha de entrar por un pequeño orificio, que al variar de tamaño cambia el tiempo de recuperación del fuelle y por lo tanto la temporización.
Un relé con temporización neumática consta de los siguientes elementos:
- Un temporizador neumático que comprende un filtro por donde penetra el aire comprimido y un vástago de latón en forma de cono, solidario con un tornillo de regulación para el paso de aire, que asegura la regulación progresiva de la temporización (las gamas de temporización cubren desde 0.1 segundos a 1 hora)
- Un fuelle de goma
- Un resorte antagonista situado en el interior de este fuelle
- Una bobina electromagnética para corriente continua o corriente alterna, según los casos.
- Un juego de contactos de ruptura brusca y solidarios al temporizador neumático por medio de un juego de levas y palancas.
Temporizador de Motor Síncrono
Temporizador que actúa por medio de un mecanismo de relojería accionado por un pequeño motor, con embrague electromagnético. Al cabo de cierto tiempo de funcionamiento entra en acción el embrague y se produce la apertura o cierre del circuito.
Temporizadores Electrónico
El principio básico de este tipo de temporización, es la carga o descarga de un condensador mediante una resistencia. Por lo general se emplean condensadores electrolíticos, siempre que su resistencia de aislamiento sea mayor que la resistencia de descarga: en caso contrario el condensador se descargaría a través de su insuficiente resistencia de aislamiento.
En este caso, se trata de relés cuya bobina esta alimentada exclusivamente por corriente continua.
La temporización electrónica está muy extendida. Se utiliza con relés electromagnéticos cuya bobina está prevista para ser alimentada con corriente continua. Para obtener una buena temporización, la tensión continua debe estabilizarse por ejemplo con ayuda de un diodo Zener.
El principio básico de este tipo de temporización es la carga o descarga de un condensador " C " mediante una resistencia " R ". por lo general se emplean condensadores electrolíticos de buena calidad, siempre que su resistencia de aislamiento sea bastante mayor que la resistencia de descarga R : en caso contrario, el condensador C se descargaría a través de su insuficiente resistencia de aislamiento.
Temporizador Magnético
Se obtiene ensartando en el núcleo magnético del relé, un tubo de cobre. Este tubo puede tener el espesor de algunos milímetros y rodear al núcleo en toda su longitud, constituyendo una camisa o bien puede ser de un diámetro igual a la base del carrete de la bobina y una longitud limitada, y en este caso se llamamanguito ; el manguito puede ser fijado delante, en la parte de la armadura, o en la parte opuesta.
Título: TEMPORIZADOR NEUMATICO PARA JUGUETERIA.
Resumen: TEMPORIZADOR NEUMATICO PARA JUGUETERIA, QUE ESTANDO DISEÑADO PARA APLICARSE A CUALQUIER TIPO DE JUGUETE CAPAZ DE EMITIR UN SONIDO O FRASE, Y PREVISTO EL TEMPORIZADOR EN SI PARA ACTIVAR EL DISPOSITIVO SONORO O HABLADOR DE QUE SE TRATE Y RETARDAR SU PARADA PARA PERMITIR LA REPRODUCCION COMPLETA DE ESE SONIDO O FRASE, SE CARACTERIZA PORQUE COMPRENDE UNA CAZOLETA CUYO FONDO SE PROLONGA EN UN CUELLO EXTERNO, AXIAL Y EXCENTRICO, EL CUAL ALBERGA UN FUELLE HUECO CUYA EMBOCADURA SUPERIOR SE ENCUENTRA OBTURADA POR UNA PLACA SOLIDARIZADA AL EXTREMO INFERIOR DE UN VASTAGO DE MATERIAL AISLANTE Y DESPLAZABLE EN SENTIDO ASCENDENTE Y DESCENDENTE, VASTAGO QUE ES PASANTE POR UN ORIFICIO PREVISTO EN LA PLACA DE FONDO QUE SEPARA LA CAZOLETA DEL CUELLO DE UBICACION DEL FUELLE, PROLONGANDOSE ESTE POR SU EXTREMO INFERIOR EN UNA PORCION TUBULAR AXIAL, PASANTE A TRAVES DEL FONDO DE DICHO CUELLO, EN CUYA PORCION TUBULAR VA ACOPLADO UNO DE LOS EXTREMOS DE UN CONDUCTO LARGO Y EMERGENTE AL EXTERIOR, QUE EN SU OTRO EXTREMO INCORPORA UNA VALVULA DE MEMBRANA QUE PERMITE LA ENTRADA Y SALIDA DEL AIRE CON LENTITUD; HABIENDOSE PREVISTO QUE EL EXTREMO SUPERIOR DEL VASTAGO SE REMATE EN UNA CABEZA ENFRENTADA A UN CUERPO ESFERICO DE GRAN PESO, EL CUAL ESTA SUJETO SOBRE EL EXTREMO DE UN RESORTE RADIAL Y BASCULANTE FIJADO POR SU OTRO EXTREMO A LA SUPERFICIE LATERAL INTERNA DE LA CAZOLETA.
Solicitante: FABRICAS AGRUPADAS DE MUÑECAS DE ONIL, S.A.
Nacionalidad: ES
Provincia: ALICANTE
Inventor/es: FERRI LLORENS, JAIME
Fecha de Solicitud: 15/02/1990
Fecha de Publicación de la Concesión: 01/05/1991
Fecha de Concesión: 27/02/1991
Clasificación Principal: A63H5/00, A63H29/16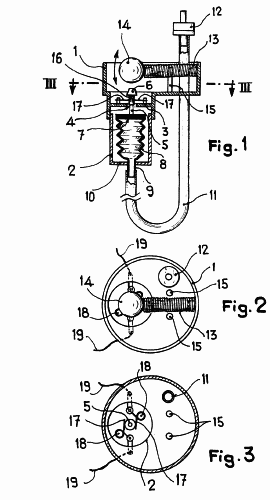

Mando neumático de Inversión retardado (temporizador)Estas válvulas se componen de una válvula distribuidora 3/2, de accionamiento neumático, un regulador unidireccional (válvula antirretorno y de estrangulación) y un depósito pequeño de aire. Temporizador (cerrado en posición de reposo) Figura 125: Temporizador (cerrado en posición de reposo)    |
Funcionamiento:
El aire comprimido entra en la válvula por el empalme P. El aire de mando entra en la válvula por el empalme Z y pasa a través de un regulador unidireccional; según el ajuste del tornillo de éste, pasa una cantidad mayor o menor de aire por unidad de tiempo al depósito de aire incorporado. Una vez que existe la suficiente presión de mando en el depósito, se mueve el émbolo de mando de la válvula distribuidora 3/2 hacia abajo. Este émbolo cierra el escape de A hacia R. El disco de válvulas se levanta de su asiento, y el aire puede pasar de P hacia A. El tiempo en que se forma presión en el depósito corresponde al retardo de mando de la válvula.
Para que el temporizador recupere su posición inicial, hay que poner en escape el conducto de mando Z. El aire del deposito escapa a través de¡ regulador unidireccional y del conducto de escape de la válvula de señalización a la atmósfera. Los muelles de la válvula vuelven el émbolo de mando y el disco de la válvula a su posición Inicial. El conducto de trabajo A se pone en escape hacia R, y P se cierra.


Temporizador (abierto en posición de reposo)
Figura 126: Temporizador (abierto en posición de reposo)


Funcionamiento:
Aquí también tenemos una combinación de elementos: Una válvula distribuidora 3/2, un regulador unidireccional (válvula antirretorno y de estrangulación) y un depósito de aire. La válvula distribuidora 312 está normalmente abierta en posición de reposo.
El aire de mando entra también aquí por el empalme Z. Cuando se ha formado la presión de mando necesaria en el depósito, se pilota la válvula 3/2. Esta cierra el paso de P hacia A. El conducto de trabajo A se pone en escape a través de R. El tiempo de retardo corresponde nuevamente al tiempo en que se forma presión en el acumulador. Cuando se evacua el aire del empalme Z, la válvula 3/2 adopta su posición inicial.
En ambos tipos de temporizadores, el tiempo de retardo normal es de 0 a 30 segundos. Este tiempo puede prolongarse con un depósito adicional. Si el aire es limpio y la presión constante, se obtiene una temporización exacta.

Válvula distribuidora 5/4
Esta combinación de elementos consta de cuatro válvulas distribuidoras 2/2 normalmente cerradas en posición de reposo. En la posición inicial, todos los conductos están bloqueados.
Figura 127:

Cuando entra aire comprimido por Z, las válvulas ocupan la siguiente posición: El aire pasa de P hacia A, y el conducto B se pone en escape hacia S.

Diapositiva PPT
Un Temporizador es un componente en el que los contactos no cambian instantáneamente como los demás, sino que cambian un después de pasar un tiempo desde la orden.
Tipos de temporizadores según la tecnología:
- Temporizadores neumáticos
- Temporizadores electrónicos
Tipos de temporizadores según su funcionamiento:
- Temporizadores al trabajo
- Temporizadores al reposo
Ambas clasificaciones pueden ser simultaneas:
TEMPORIZADOR NEUMATICO AL TRABAJO
CONSTRUCCIÓN, FUNCIONAMIENTO Y SIMBOLOGÍA DE LOS ELEMENTOS NEUMÁTICOS DE MANDO Y CONTROL
Definición de válvula neumática:
Elemento que permite controlar el arranque, parada, dirección, sentido y flujo del aire en un circuito neumático.

- Válvula de asiento:
En la válvula de asiento el paso de aire comprimido es abierto o cerrado mediante una bola, cono o disco plano (ver siguiente figura). La estanqueidad del asiento se realiza casi siempre con juntas elásticas.

La característica principal en el funcionamiento de la válvula de asiento se observa al inyectar aire comprimido por la parte superior de la válvula (para cualquiera de los casos mostrados en la figura anterior). El aire comprimido, en este caso, ejerce presión sobre el elemento (bola, cono o disco plano) que choca contra el asiento de la válvula, produciéndose así una gran fuerza de contacto entre estos dos últimos, y por tanto, una buena estanqueidad.

- Válvula de corredera:
La válvula de corredera basa su funcionamiento en un émbolo cilíndrico que se desplaza axialmente y reparte el flujo de aire a las distintas conexiones, según se muestra en la siguiente figura. En el caso (a) la corredera se encuentra en el extremo izquierdo permitiendo que se comunique la vía "A" con la "R", mientras que la toma de presión "P" se encuentra cerrada. Desplazando el pistón hacia la derecha, se comunicaría la vía "P" con la "A", y la vía "R" se encontraría cerrada. En este tipo de válvula se requiere de un pequeño esfuerzo para la conmutación de sus vías, pero como aspecto negativo se tiene que es sensible a la suciedad y la mayoría de sus piezas están sometidas a desgaste por rozamiento.


Clasificación de las válvulas según la acción que realizan sobre el flujo de aire en un circuito neumático:
- Válvula distribuidora o de vías:
Funcionamiento:
Este tipo de válvula influye en el camino del aire comprimido, específicamente en el arranque, parada, dirección y sentido del mismo.
Dentro de este tipo de válvulas existen algunas que vienen fabricadas con un elemento de reposición interno (por ejemplo, un resorte), en cuyo caso, la válvula puede estar en dos posibles estados:
- Estado de reposo: Cuando el elemento de reposición no ha sido accionado.
- Estado de conmutación: Cuando el elemento de reposición ha sido accionado.
Representación simbólica:
Las válvulas distribuidoras pueden ser de dos o tres posiciones de maniobra, y pueden tener desde dos hasta cinco vías. La Norma ISO-1219 representa simbólicamente a cada posición por un cuadrado, por lo tanto, dos cuadrados pegados el uno al otro representan una válvula de dos posiciones, y análogamente, tres cuadrados representan una válvula de 3 posiciones (tal y como se muestra en la siguiente figura). La cantidad de vías de una válvula está representada por el número de orificios que presenta el cuerpo de la válvula (en caso de que la válvula sea de pilotaje o mando neumático, se excluyen los orificios usados para este fin). Las vías de una válvula permiten la comunicación neumática de la válvula con el exterior. Simbólicamente, el número de vías de una válvula está dado por la cantidad de líneas que cruzan al exterior del cuadrado que representa la posición de reposo de la válvula.

Dentro de cada cuadrado se pueden representar líneas con el sentido de circulación del flujo de aire, obturadores o tapones que cierran el paso del flujo de aire, o bien, la unión de conductos de aire, tal como se muestra en la siguiente figura:

La Norma ISO-1219 establece una convención en la simbología de válvulas de vías, que se muestra a continuación:

Por otro lado, establece una convención que permite especificar su número de vías y posiciones, la cual es:
Válvula # de vías / # de posiciones.
Ejemplo: Una válvula 3/2, normalmente cerrada (N.C.), accionada eléctricamente y con retorno por muelle.
,o también:
Válvula # de vías / # de posiciones vías .
Ejemplo: Una válvula 3/2 vías, normalmente abierta (N.A.), con pilotaje neumático y retorno por muelle.
Para el caso de válvulas de dos posiciones y de 2 ó 3 vías, se indica si la válvula es normalmente cerrada "NC" (la válvula en su estado de reposo bloquea el paso de aire a través de su vía de utilización), o normalmente abierta "NA" (la válvula en su estado de reposo permite el paso de aire a través de su vía de utilización).
Para el caso de válvulas de dos posiciones y de 4 ó 5 vías, se indica si es de tipo "12" (cuando la válvula está en su estado de reposo existe flujo de aire comprimido de la vía 1 a la vía 2) ó "14" (cuando la válvula está en su estado de reposo existe flujo de aire comprimido de la vía 1 a la vía4).
A continuación se presentan las principales configuraciones para válvulas distribuidoras o de vías, donde se muestran claramente las convenciones mencionadas anteriormente según la Norma ISO-1219:
Válvula 2/2 (NC y NA):

Válvula 3/2 (NC y NA):

Válvula 4/2 (12 y 14):

Válvula 5/2 (12 y 14):

Válvula 3/3:

Válvula 4/3:

Válvula 5/3:

Tipos de accionamientos de la válvula distribuidora:
La primera clasificación se establece entre accionamiento directo y accionamiento a distancia (telemando). En el accionamiento directo, el elemento que acciona a la válvula puede ser muscular (donde un operador puede usar su mano o pie) o mecánico, pero lo importante a destacar es que dicho elemento debe hacer contacto físico sobre el accionador de la válvula y por tanto deberá estar ubicado en las cercanías del mismo. En el accionamiento a distancia se comanda a la válvula desde un sitio alejado a ella, mediante la utilización de energía neumática o eléctrica. En el siguiente par de tablas se muestra la clasificación general de los tipos de accionamientos de la válvula distribuidora:

Tabla. Accionamiento directo.

Tabla. Accionamiento a distancia.
- Válvula antirretorno o de bloqueo:
Funcionamiento:
Permite el paso de aire comprimido en un sentido y lo impide en el otro. Generalmente, este tipo de válvula es de asiento de bola, o de asiento cónico. A medida que aumenta la presión en el sentido del bloqueo, se logra mayor estanqueidad en el cierre de la válvula.
Representación simbólica:

- Válvula reguladora de caudal bidireccional:
Funcionamiento:
El caudal o cantidad de aire comprimido por unidad de tiempo que pasa a través de este tipo de válvula puede ser regulado desde cero hasta el máximo permitido para cualquiera de los dos sentidos posibles de circulación del aire a través de ella.
Representación simbólica:
- Válvula reguladora de caudal unidireccional:
Funcionamiento:
Regula el caudal o cantidad de aire comprimido por unidad de tiempo que pasa en un sentido de circulación, mientras que en el otro sentido lo deja fluir libremente.
Representación simbólica:

- Válvula de escape rápido:
Funcionamiento:
Generalmente, se emplea para obtener mayor rapidez en la carrera de los actuadores neumáticos (cilindros, etc.). Una aplicación común de este tipo de válvula se observa en los circuitos neumáticos donde una válvula de vías comanda a un actuador (por ejemplo, un cilindro de simple efecto con retorno por muelle). En este caso, la válvula de escape rápido se instala sobre la vía de alimentación del actuador neumático, desde donde se encargará de que el aire comprimido que envía el elemento de mando (válvula de vías) fluya normalmente hacia el actuador y que luego la salida de aire del actuador se haga directamente a la atmósfera, sin tener que regresar a través de todo el camino desde donde se inyectó la presión inicialmente.
Representación simbólica:

- Válvula lógica "AND":
Funcionamiento:
Este tipo de válvula dispone de dos entradas y una salida. El aire podrá circular hacia la salida sólo si las dos entradas reciben alimentación de presión simultáneamente. También es conocida como "válvula de simultaneidad".
Representación simbólica:

- Válvula lógica "OR":
Funcionamiento:
Dispone de dos entradas y una salida. El aire podrá circular hacia la salida si al menos una de las entradas recibe alimentación de presión. También se conoce como "válvula selectora".
Representación simbólica:

- Temporizador neumático:
Funcionamiento:
Básicamente está compuesto por una válvula de 3/2 vías con pilotaje por presión neumática y retorno por muelle, una válvula reguladora de caudal unidireccional y un pulmón neumático. El temporizador neumático puede ser N.A. ó N.C., y además puede tener retardo a la conexión o desconexión de la presión en su pilotaje neumático.
El temporizador neumático será con "retardo a la conexión" (on delay) o con "retardo a la desconexión" (off delay) si el regulador de caudal unidireccional restringe la "entrada" o "salida" de presión en el pilotaje neumático de dicha válvula, respectivamente.
En el caso del "temporizador neumático con retardo a la conexión", luego de cierto tiempo "t" desde que se aplica presión a su pilotaje neumático, aparece esta misma presión a la salida de su pulmón, y por otro lado, si se interrumpe la presión a su pilotaje neumático, la salida de presión del pulmón cesa inmediatamente (la presión escapa directamente a la atmósfera a través del pilotaje neumático).

Fig. Curvas de tiempo del temporizador neumático N.A. con retardo a la conexión.

Fig. Curvas de tiempo del temporizador neumático N.C. con retardo a la conexión.
En el caso de la "temporizador neumático con retardo a la desconexión", cuando se aplica presión a su pilotaje neumático, simultáneamente aparece esta misma presión a la salida de su pulmón, y por otro lado, si se interrumpe la presión a su pilotaje neumático, la salida de presión del pulmón cesa sólo después de un lapso de tiempo "t" determinado (el aire comprimido escapa a la atmósfera pero con restricción de su caudal, a través del pilotaje neumático).

Fig. Curvas de tiempo del temporizador neumático N.A. con retardo a la desconexión.

Fig. Curvas de tiempo del temporizador neumático N.C. con retardo a la desconexión.
El regulador de caudal unidireccional dispone de un tornillo mediante el cual se puede ajustar el tiempo de accionamiento del temporizador neumático (tiempo en el cual el acumulador o pulmón neumático alcanza una presión determinada).
Representación simbólica:
Temporizador neumático N.A. con retardo a la conexión:

Temporizador neumático N.C. con retardo a la conexión:

Temporizador neumático N.A. con retardo a la desconexión:

Temporizador neumático N.C. con retardo a la desconexión:

- Válvula de seguridad:
Funcionamiento:
Siempre que la presión del aire comprimido en circulación aumente más allá de cierto nivel establecido en un sistema neumático, la válvula de seguridad deja escapar hacia la atmósfera parte del aire comprimido con la finalidad de que la presión regrese al valor fijado y de esta manera evitar que los dispositivos neumáticos sufran daños. Algunos modelos de válvulas de seguridad permiten que un operador ajuste el valor de la presión a la cual la válvula actuará, mientras que otros modelos vienen sellados de manera que sólo personal autorizado tenga acceso a ella. También se conoce como válvula limitadora de presión.
Representación simbólica:
Ajustable

No ajustable

- Válvula de secuencia:
Funcionamiento:
La válvula de secuencia se sitúa normalmente sobre la línea de alimentación de un actuador o de un circuito neumático. Su funcionamiento es similar al de una válvula de seguridad, la diferencia está en que cuando la presión del aire comprimido en circulación aumente más allá de un valor fijado, el exceso de presión no será liberado a la atmósfera sino que será aprovechado para realizar una determinada función (alimentar a un actuador o a un circuito neumático).
Representación simbólica:
Ajustable

No ajustable

Sensor

Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), una Tensión eléctrica (como en un termopar), una corriente eléctrica(como en un fototransistor), etc.
Un sensor se diferencia de un transductor en que el sensor está siempre en contacto con la variable de instrumentación con lo que Puede decirse también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro dispositivo. Como por ejemplo el termómetro de mercurio que aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la temperatura. Un sensor también puede decirse que es un dispositivo que convierte una forma de energía en otra. Áreas de aplicación de los sensores: Industria automotriz, Industria aeroespacial, Medicina , Industria de manufactura, Robótica , etc.
Los sensores pueden estar conectados a un computador para obtener ventajas como son el acceso a una base de datos, la toma de valores desde el sensor, etc
Contenido |
[editar]Características de un sensor
Entre las características técnicas de un sensor destacan las siguientes:
Rango de medida: dominio en la magnitud medida en el que puede aplicarse el sensor.
Precisión: es el error de medida máximo esperado.
Offset o desviación de cero: valor de la variable de salida cuando la variable de entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset.
Linealidad o correlación lineal.
Sensibilidad de un sensor: relación entre la variación de la magnitud de salida y la variación de la magnitud de entrada.
Resolución: mínima variación de la magnitud de entrada que puede apreciarse a la salida.
Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada.
Derivas: son otras magnitudes, aparte de la medida como magnitud de entrada, que influyen en la variable de salida. Por ejemplo, pueden ser condiciones ambientales, como la humedad, la temperatura u otras como el envejecimiento (oxidación, desgaste, etc.) del sensor.
Repetitividad: error esperado al repetir varias veces la misma medida.
Un sensor es un tipo de transductor que transforma la magnitud que se quiere medir o controlar, en otra, que facilita su medida. Pueden ser de indicación directa (e.g. un termómetro de mercurio) o pueden estar conectados a un indicador (posiblemente a través de un convertidor analógico a digital, un computador y un display) de modo que los valores detectados puedan ser leídos por un humano.
Por lo general, la señal de salida de estos sensores no es apta para su lectura directa y a veces tampoco para su procesado, por lo que se usa un circuito de acondicionamiento, como por ejemplo un puente de Wheatstone, amplificadores y filtros electrónicos que adaptan la señal a los niveles apropiados para el resto de la circuitería.
[editar]Resolución y precisión
La resolución de un sensor es el menor cambio en la magnitud de entrada que se aprecia en la magnitud de salida. Sin embargo, la precisión es el máximo error esperado en la medida.
La resolución puede ser de menor valor que la precisión. Por ejemplo, si al medir una distancia la resolución es de 0,01 mm, pero la precisión es de 1 mm, entonces pueden apreciarse variaciones en la distancia medida de 0,01 mm, pero no puede asegurarse que haya un error de medición menor a 1 mm. En la mayoría de los casos este exceso de resolución conlleva a un exceso innecesario en el coste del sistema. No obstante, en estos sistemas, si el error en la medida sigue una distribución normal o similar, lo cual es frecuente en errores accidentales, es decir, no sistemáticos, la repetitividad podría ser de un valor inferior a la precisión.
Sin embargo, la precisión no puede ser de un valor inferior a la resolución, pues no puede asegurarse que el error en la medida sea menor a la mínima variación en la magnitud de entrada que puede observarse en la magnitud de salida.
[editar]Tipos de sensores
En la siguiente tabla se indican algunos tipos y ejemplos de sensores electrónicos.
Magnitud | Transductor | Característica |
Posición lineal o angular | Analógica | |
Digital | ||
Desplazamiento y deformación | Analógica | |
Analógica | ||
A/D | ||
Analógica | ||
Analógica | ||
Velocidad lineal y angular | Dinamo tacométrica | Analógica |
Encoder | Digital | |
Digital | ||
A/D | ||
Analógica | ||
Aceleración | Analógico | |
Fuerza y par (deformación) | Analógico | |
A/D | ||
Presión | Membranas | Analógica |
Analógica | ||
Digital | ||
Analógica | ||
Magnético | Analógica | |
Analógica | ||
Analógica | ||
Analógica | ||
Analógica | ||
I/0 | ||
Sensores de presencia | Inductivos | I/0 |
Capacitivos | I/0 | |
Ópticos | I/0 y Analógica | |
Sensores táctiles | Matriz de contactos | I/0 |
Piel artificial | Analógica | |
Visión artificial | Cámaras de video | Procesamiento digital |
Procesamiento digital | ||
Sensor acústico (presión sonora) | ||
Sensores captura de movimiento | Sensores inerciales |
Algunas magnitudes pueden calcularse mediante la medición y cálculo de otras, por ejemplo, la velocidad de un móvil puede calcularse a partir de la integración numérica de su aceleración. La masa de un objeto puede conocerse mediante la fuerza gravitatoria que se ejerce sobre él en comparación con la fuerza gravitatoria ejercida sobre un objeto de masa conocida (patrón).